Hayabusa 2
-
slappy
- Moderátor

- Příspěvky: 2444
- Reputace: 3078
- Bydliště: Drahany
- Registrován: 9.11.2015 18:48
- Kontaktovat uživatele:
Re: Hayabusa 2
Pár výtažků z materiálů k tiskovce z dneška:
Doposud byly zveřejňované obrázky orientovány tak, že nahoře byl směr, kde má Země severní pól (od ekliptiky nahoru). Jelikož Ryugu ale rotuje kolem vlastní osy v opačném směru (retrográdně), tak to co má nahoře, je kartograficky jeho jižní pól. Proto mnou výše uvedené mapy i ten gif, co přidal Evžen, jsou otočené tak, aby severní pól Ryugu byl nahoře. (Jako orientační bod poslouží ten velký světlý polární balvan, který je najednou dole.) V budoucnu zveřejňované obrázky by už měly být orientovány tímto způsobem - sever Ryugu nahoře, tedy naopak než je tomu ve skutečnosti. (str. 12)
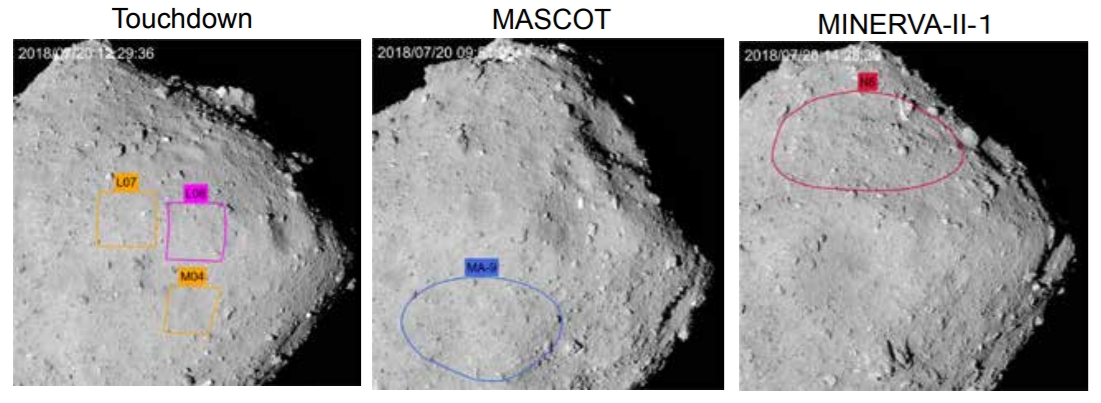
Hayabusa2 se povrchu poprvé dotkne pravděpodobně přímo na rovníku. MASCOT má přistát na jižní polokouli kousek pod rovníkem. Dvojitý modul MINERVA-II-1 má přistát na severní polokouli trošičku dál od rovníku než MASCOT. (str. 16 a 18)
11./12. září se bude provádět testovací sestup Hayabusy2.
20./21. září se oddělí MINERVA-II-1.
2./3. října se oddělí MASCOT.
Poté během října Hayabusa2 znovu otestuje manévry a koncem října se o první odběr vzorků pokusí naostro.
(str. 20)
Dále je podrobně rozebírán postup selekce přistávacích míst...

Doposud byly zveřejňované obrázky orientovány tak, že nahoře byl směr, kde má Země severní pól (od ekliptiky nahoru). Jelikož Ryugu ale rotuje kolem vlastní osy v opačném směru (retrográdně), tak to co má nahoře, je kartograficky jeho jižní pól. Proto mnou výše uvedené mapy i ten gif, co přidal Evžen, jsou otočené tak, aby severní pól Ryugu byl nahoře. (Jako orientační bod poslouží ten velký světlý polární balvan, který je najednou dole.) V budoucnu zveřejňované obrázky by už měly být orientovány tímto způsobem - sever Ryugu nahoře, tedy naopak než je tomu ve skutečnosti. (str. 12)
Hayabusa2 se povrchu poprvé dotkne pravděpodobně přímo na rovníku. MASCOT má přistát na jižní polokouli kousek pod rovníkem. Dvojitý modul MINERVA-II-1 má přistát na severní polokouli trošičku dál od rovníku než MASCOT. (str. 16 a 18)
11./12. září se bude provádět testovací sestup Hayabusy2.
20./21. září se oddělí MINERVA-II-1.
2./3. října se oddělí MASCOT.
Poté během října Hayabusa2 znovu otestuje manévry a koncem října se o první odběr vzorků pokusí naostro.
(str. 20)
Dále je podrobně rozebírán postup selekce přistávacích míst...
Naposledy upravil(a) slappy dne 4.9.2018 8:34, celkem upraveno 1 x.
-
slappy
- Moderátor
- Příspěvky: 2444
- Reputace: 3078
- Bydliště: Drahany
- Registrován: 9.11.2015 18:48
- Kontaktovat uživatele:
Re: Hayabusa 2
Moc pěkné Evžene. Jednotlivých 12 snímků je k prozkoumávání zde.
Dále tu máme výsledky z laserového altimetru. Nejvíce měření je podél rovníku, zatímco na pólech jsou stále nepokrytá místa. To souvisí s oblastmi, v jakých se Hayabusa2 nad Ryugu pohybuje (BOX-A/B/C):

Infračervená termografie ukazuje, že jižní polokoule je teplejší. Ačkoli se původně říkalo, že rotační osa Ryugu je téměř kolmá na rovinu oběhu, viděl jsem nyní údaj, že sklon je zhruba 8° (asi by se mělo udávat 188° nebo 172° z důvodu retrográdní rotace). Každopádně to evidentně stačí na sezónní rozdíly v teplotě povrchu:
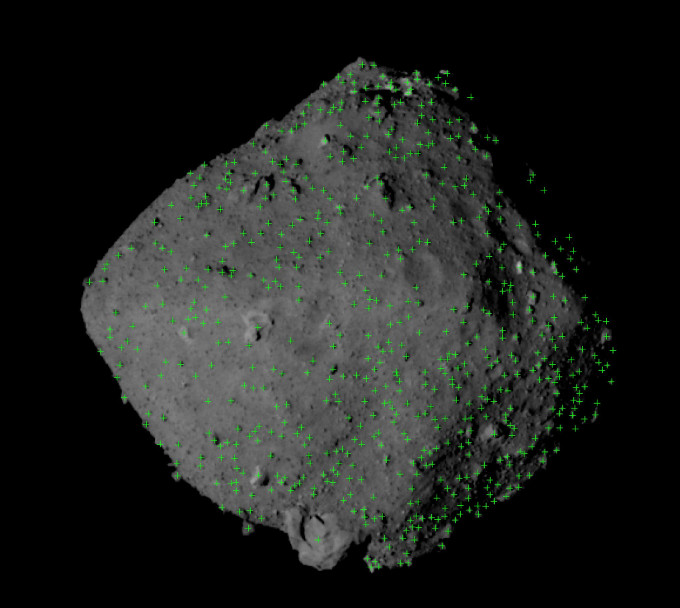
Základem je taky spočítání balvanů na povrchu Ryugu. Zelené křížky ukazují každý balvan větší než ~8 m. Je vidět, že hustota „obalvanování“ není všude zcela rovnoměrná:

Taky vyšly anglické překlady dvou starších článků o navigaci sondy:
How the Star Tracker image of Ryugu was used for optical navigation
The people behind the OPNAV
Dále tu máme výsledky z laserového altimetru. Nejvíce měření je podél rovníku, zatímco na pólech jsou stále nepokrytá místa. To souvisí s oblastmi, v jakých se Hayabusa2 nad Ryugu pohybuje (BOX-A/B/C):
Infračervená termografie ukazuje, že jižní polokoule je teplejší. Ačkoli se původně říkalo, že rotační osa Ryugu je téměř kolmá na rovinu oběhu, viděl jsem nyní údaj, že sklon je zhruba 8° (asi by se mělo udávat 188° nebo 172° z důvodu retrográdní rotace). Každopádně to evidentně stačí na sezónní rozdíly v teplotě povrchu:
Základem je taky spočítání balvanů na povrchu Ryugu. Zelené křížky ukazují každý balvan větší než ~8 m. Je vidět, že hustota „obalvanování“ není všude zcela rovnoměrná:
Taky vyšly anglické překlady dvou starších článků o navigaci sondy:
How the Star Tracker image of Ryugu was used for optical navigation
The people behind the OPNAV

Re: Hayabusa 2
slappy, díky za info! 
-
slappy
- Moderátor
- Příspěvky: 2444
- Reputace: 3078
- Bydliště: Drahany
- Registrován: 9.11.2015 18:48
- Kontaktovat uživatele:
Re: Hayabusa 2
A dnešní novinka z japonské stránky „Operational situation“:
Hayabusa2 nyní poletovala ±9 km podélně v BOXu-B 20 km nad asteroidem.
11. září proběhne první nácvik odběru vzorků. Sonda sestoupí až na 30 m, možná i míň nad povrch a pořídí detailní snímky odběrového místa a poprvé od startu použije laserový sensor s krátkým dosahem (LRF) pro zmapování jeho výškového profilu.
Hayabusa2 nyní poletovala ±9 km podélně v BOXu-B 20 km nad asteroidem.
11. září proběhne první nácvik odběru vzorků. Sonda sestoupí až na 30 m, možná i míň nad povrch a pořídí detailní snímky odběrového místa a poprvé od startu použije laserový sensor s krátkým dosahem (LRF) pro zmapování jeho výškového profilu.
-
Evžen111

- Inženýr kosmonautiky

- Příspěvky: 1499
- Reputace: 262
- Bydliště: Hlásnice
- Registrován: 5.7.2015 11:14
Re: Hayabusa 2
s poděkováním se přidávám také!ptpc píše:slappy, díky za info!
E
-
slappy
- Moderátor
- Příspěvky: 2444
- Reputace: 3078
- Bydliště: Drahany
- Registrován: 9.11.2015 18:48
- Kontaktovat uživatele:
Re: Hayabusa 2
Selfíčko Hayabusy2 (konkrétně odběrové hlavice) ze 14. srpna:
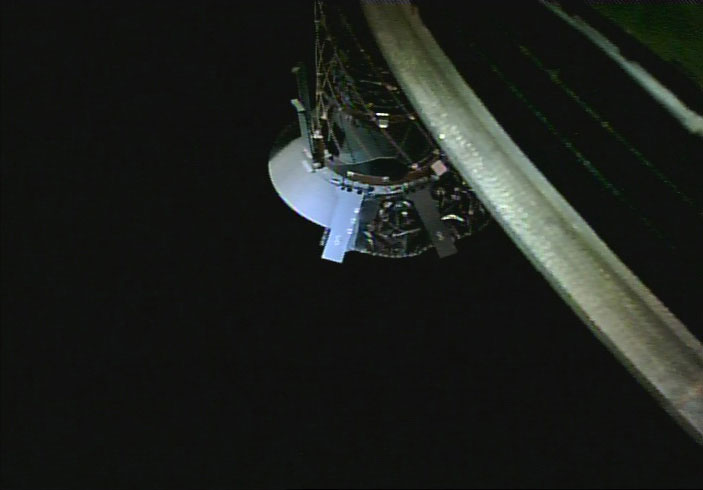
Trošku špatně jsem pochopil to s tím Laser Range Finderem. Jsou to čtyři lasery fungující ve výškách <35 m nad povrchem, každý míří do jiného směru a jejich kombinovaný výstup se použije k udržení orientace sondy, aby hlavice odběrového mechanismu zůstávala rovnoběžně s povrchem pod ní. Pátý laser míří na terčík na odběrové hlavici a jakmile dojde ke kontaktu s povrchem a hlavice se pohne, LRF to zaznamená a vyšle příkaz k vystřelení projektilu.
Fotka z testu LRF z letošního dubna:

Fotky byly pořízeny malou kamerkou Sampler Horn Monitor Camera (CAM-H):

Sampler horn imaged with a small monitor camera
Trošku špatně jsem pochopil to s tím Laser Range Finderem. Jsou to čtyři lasery fungující ve výškách <35 m nad povrchem, každý míří do jiného směru a jejich kombinovaný výstup se použije k udržení orientace sondy, aby hlavice odběrového mechanismu zůstávala rovnoběžně s povrchem pod ní. Pátý laser míří na terčík na odběrové hlavici a jakmile dojde ke kontaktu s povrchem a hlavice se pohne, LRF to zaznamená a vyšle příkaz k vystřelení projektilu.
Fotka z testu LRF z letošního dubna:
Fotky byly pořízeny malou kamerkou Sampler Horn Monitor Camera (CAM-H):
Sampler horn imaged with a small monitor camera
-
slappy
- Moderátor
- Příspěvky: 2444
- Reputace: 3078
- Bydliště: Drahany
- Registrován: 9.11.2015 18:48
- Kontaktovat uživatele:
Re: Hayabusa 2
Na stránce Haya2NOW je teď zrovna vidět, jak Ryugu „vyrostl“ v zorném poli širokoúhlé kamery ONC-W1. To znamená, že Hayabusa2 musela sestoupit z 20 km níž a něco zrovna nacvičuje blíže k povrchu. Tipuju, že to jsou standardní operace v BOX-C.
-
Pospíšil

- Velezkušený znalec kosmonautiky

- Příspěvky: 12015
- Reputace: 13089
- Bydliště: Pardubice
- Registrován: 22.7.2012 19:00
Re: Hayabusa 2

---
"Mystery creates wonder and wonder is the basis of man's desire to understand." Neil Armstrong
"Mystery creates wonder and wonder is the basis of man's desire to understand." Neil Armstrong
-
slappy
- Moderátor
- Příspěvky: 2444
- Reputace: 3078
- Bydliště: Drahany
- Registrován: 9.11.2015 18:48
- Kontaktovat uživatele:
Re: Hayabusa 2
Nahlédněte na PDFko z 5. září. Sice zatím jen v japonštině, ale najdete tam jednu fotku Ryugu pořízenou z oblasti BOX-B, mapu gravitačního zrychlení či vyladěnější topografickou mapu povrchu.
EDIT: Zde v angličtině
EDIT: Zde v angličtině
Naposledy upravil(a) slappy dne 11.9.2018 8:00, celkem upraveno 1 x.