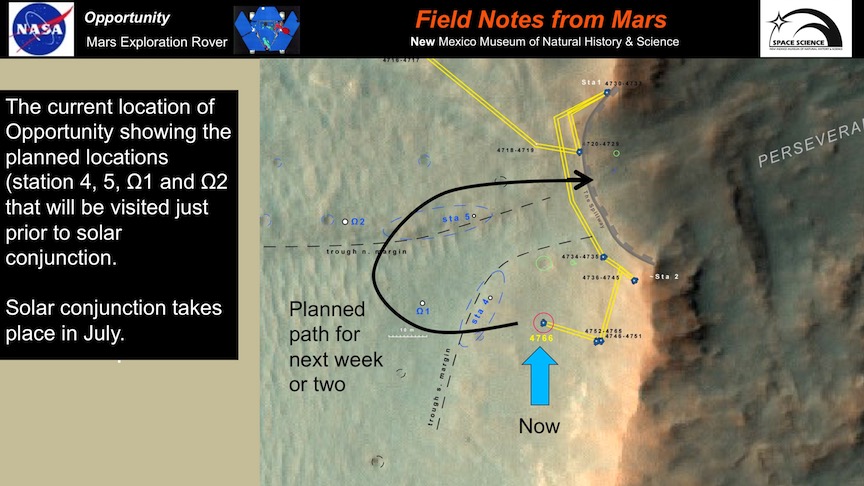
Evžen111 píše:Díky za zprávu, momentálni situace vypadá následovně
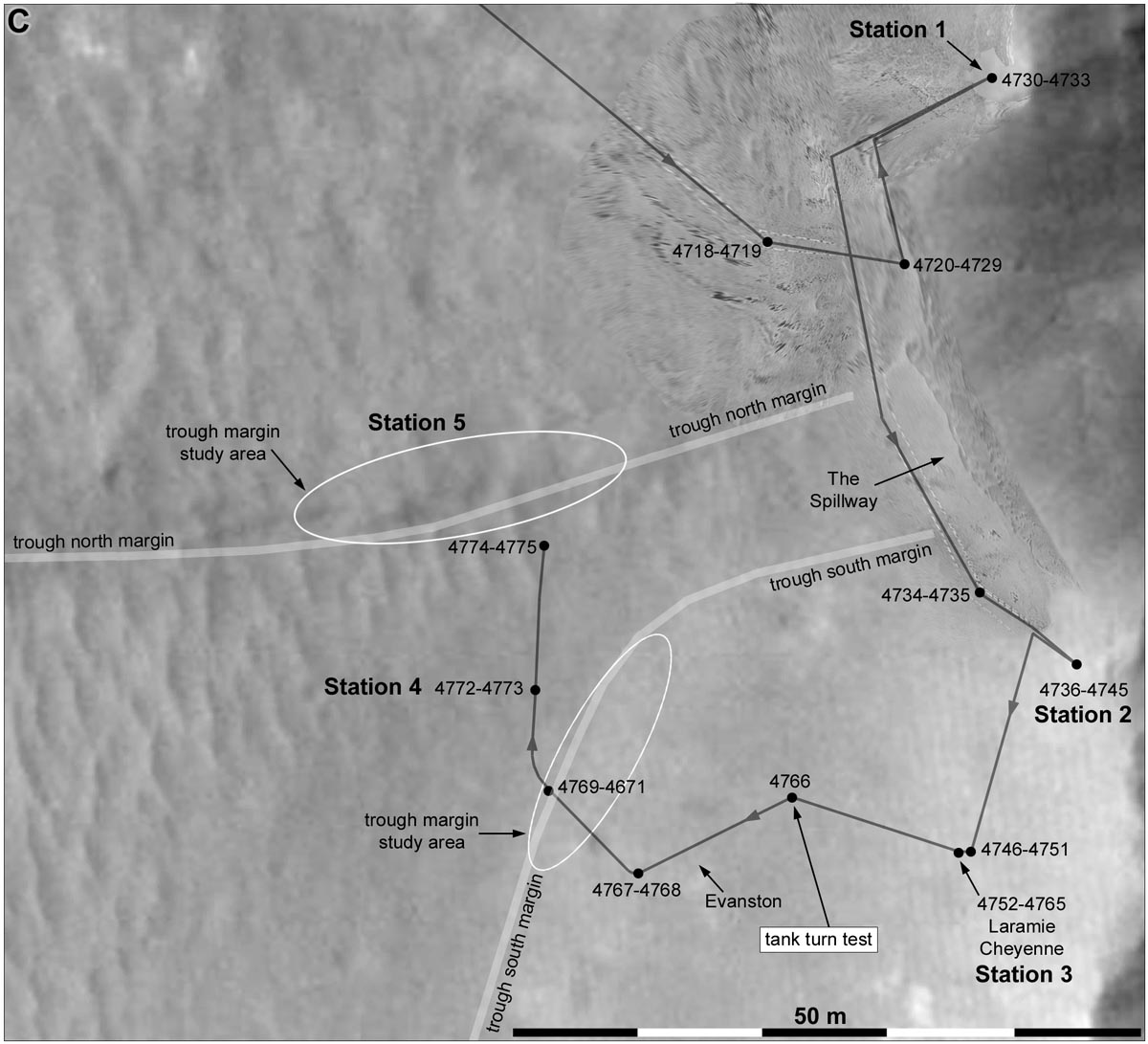
K této mapě se váže jedna zajímavost, k níž došlo během jízdy solu 4766. Původně totiž byla na mapě, kterou sestavuje Phil Stooke na fóru UMSF, ujetá vzdálenost mezi soly 4765 a 4766 jen poloviční, cca 6 metrů.
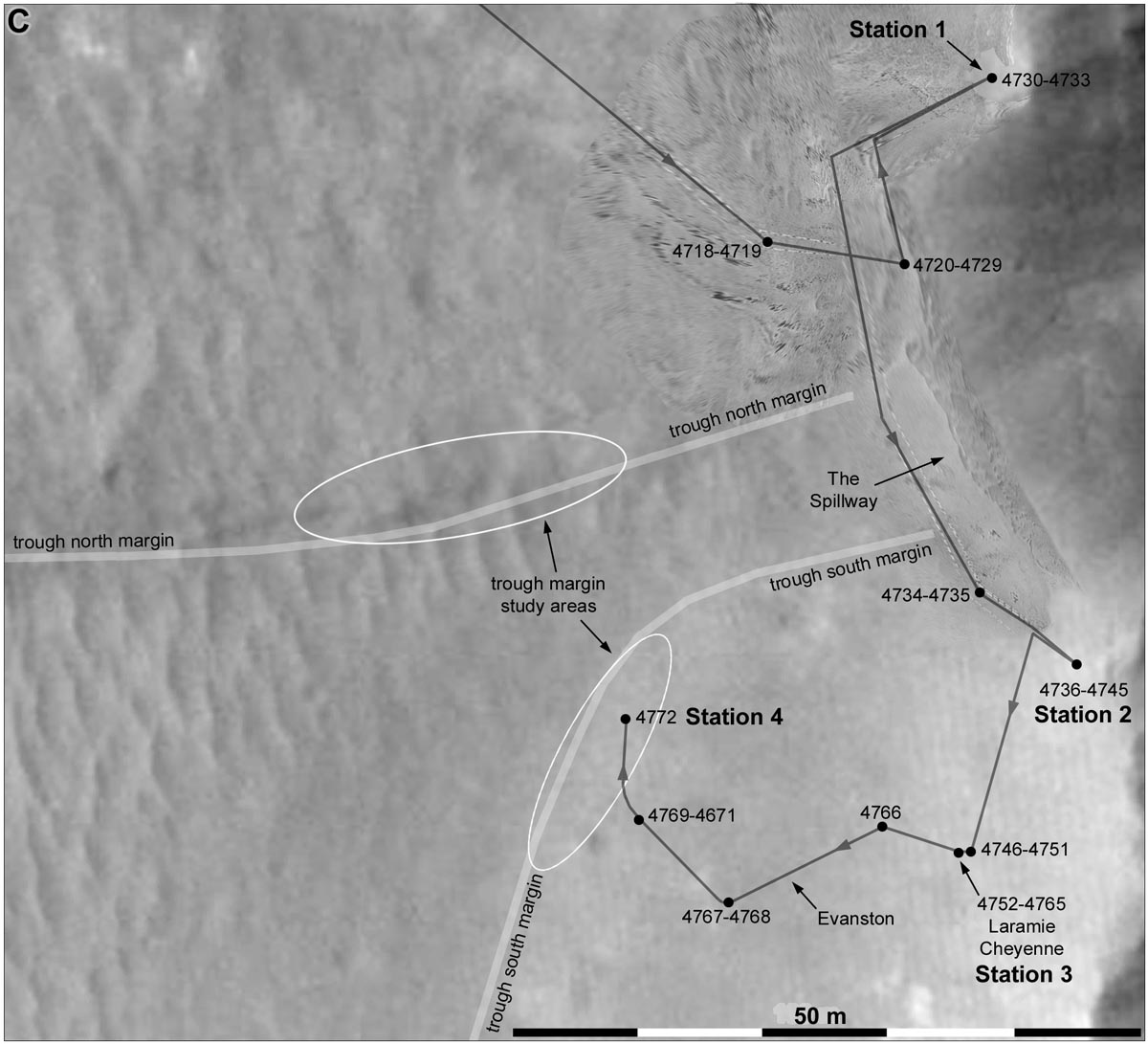
Po jejím zveřejnění v diskusi se ozval Paolo Bellutta, jeden z rover drivers v JPL. Ve skutečnosti se rover posunul o 14 m, což bylo opraveno až v následující verzi mapky.
Paolovo vysvětlení jak k omylu v MER datech a posléze Philově mapce došlo:
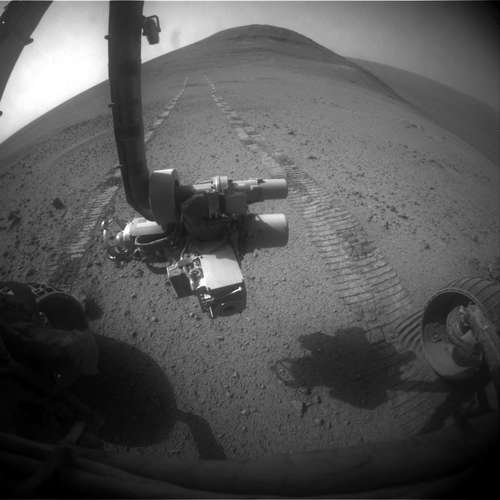
Během jízdy solu 4766 došlo ke zvláštní chybě VO (Visual Odometry - vizuální měření vzdálenosti pro autonomní řízení roveru). Byli jsme nuceni namířit kameru dozadu na stopy kol roveru, protože v okolí nebylo nic jiného, podle čeho bychom mohli měřit ujetou vzdálenost - okolní blízký terén je velmi jednotvárný a bez výrazných záchytných bodů. Během jízdy pak došlo k tomu, že nejvýraznějším opticky rozeznatelným útvarem se stal vlastní protáhlý stín roveru, který začal VO software pilně sledovat. V důsledku toho si navigační SW v jedné chvíli začal myslet, že se rover nikam neposouvá a zastavil jízdu po 14 metrech. Ale nesprávná aktualizace polohy z VO označila polohu roveru jen 6 metrů od výchozího bodu. Skutečně ujetá vzdálenost ovšem byla 14 metrů. Nedá se to považovat za skutečnou chybu, je to jen kombinace limitujících faktorů, se kterými se musíme potýkat (nedostatek flash paměti, nízká úroveň energie v bateriích, která nutí řidiče plánovat jízdu až na pozdní odpoledne, kdy jsou baterie dostatečně nabité a ještě nedostatek optických orientačních bodů v terénu). Řečeno obrazně, občas chybí cukr, abychom namíchali správnou limonádu.